Intro to motor characteristics
Motor datasheets come with many different parameters mentioned and it could be difficult to understand which of them are relevant or not in context of using the motor for purpose of FFB. AS we do not use motor for moving things (as it is used usually) we do not care about some of them and the same time some parameters are critical for us.
Important
Rated current/Peak current in Amps - Shows us how much current motor consumes and could indicate which current we need to expect from PSU. This parameter in combination wit kV could be used for torque capabilities.
Rated torque/Peak torque in Nm - Usually corresponds to previous parameter as it directly proportional to it. The higher this value the stronger will be final device.
kV - It shows how many RPM motor spin if 1 volt applied to the motor. In addition it allow us to estimate or cross check motor torque by using the formula 60 / (2 * Pi * kV) * Amps = Torque.
Could be ignored
Rated/Nominal voltage in V - Do not care. It is nominal value and it does not affect motor in FFB use.
Rated/Nominal power in W - Do not tell us much because it is nominal on nominal RPM, but we use motor in specific so called “stall mode”. So ignore it.
Supported motor types
FFBeast project based on BLDC (BRUSHLESS) motor.
There is no DC or Stepper motor support!
Virtually any BLDC motor with three phases will work, ranging from hobby-grade to industrial. The performance of the final device will be determined by the characteristics of the motor you choose. A motor capable of producing more torque will result in a stronger final device.
Number of different BLDC motors was tested for this project. And all of them worked.
Hobby grade RC motors
First attempts to build joystick were using this kind of motor. In general - them work. But even motors with the lowest kV are pretty weak and do not produce good force. 
Robotic actuators
Tested in attempts to find motors with higher power. Works! Have good power, but because of planetary reducer those actuators have significant backlash. And them are not the cheapest option. So I do not use them in my projects. If you need extremely compact, powerful solution and there is a budget - could be an option.

Industrial servo motors
AC servo motor is a good option if you are not restricted in budget. As servo motors are not cheap. But there are examples when people did use it.

It need to be AC servo. With 3 phases. DC or Stepper motors are not supported!
Howerboard/Scooter motor

As of now, the hoverboard/scooter motor is considered the best alternative in terms of the price-to-torque ratio. It can be as affordable as 10 USD per item on the second-hand market, offering a peak torque of up to 15Nm. You can find them as standalone units or as part of refurbished hoverboards.
Simply search your local second-hand market, and you’re likely to come across some excellent propositions.
Are them all equal?
Unfortunately - NO!
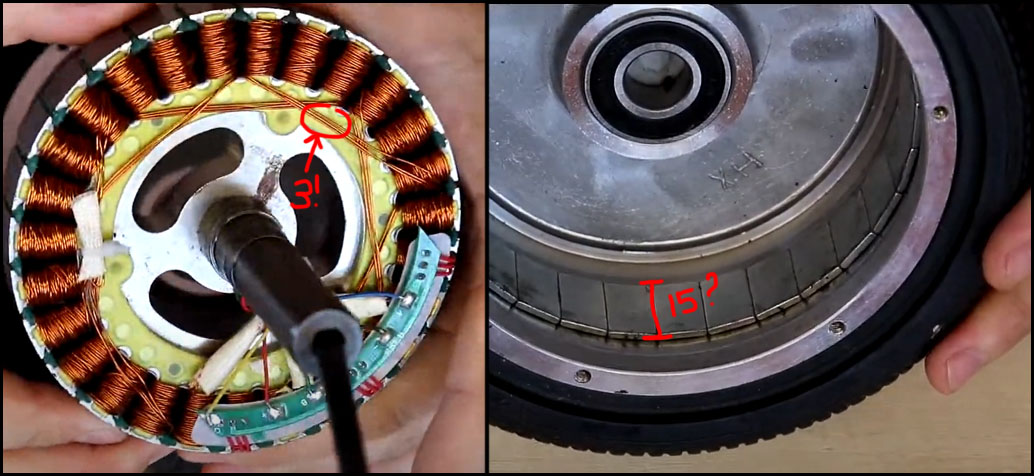
Despite the similar external dimensions of these motors, they can vary internally. The motor’s power is determined by the width of the stator, the diameter of the stator, and the number of strands in the motor winding
The most powerful items have stator width 30mm and 300mm magnets. It is coupled with 5 strand in motor winding. 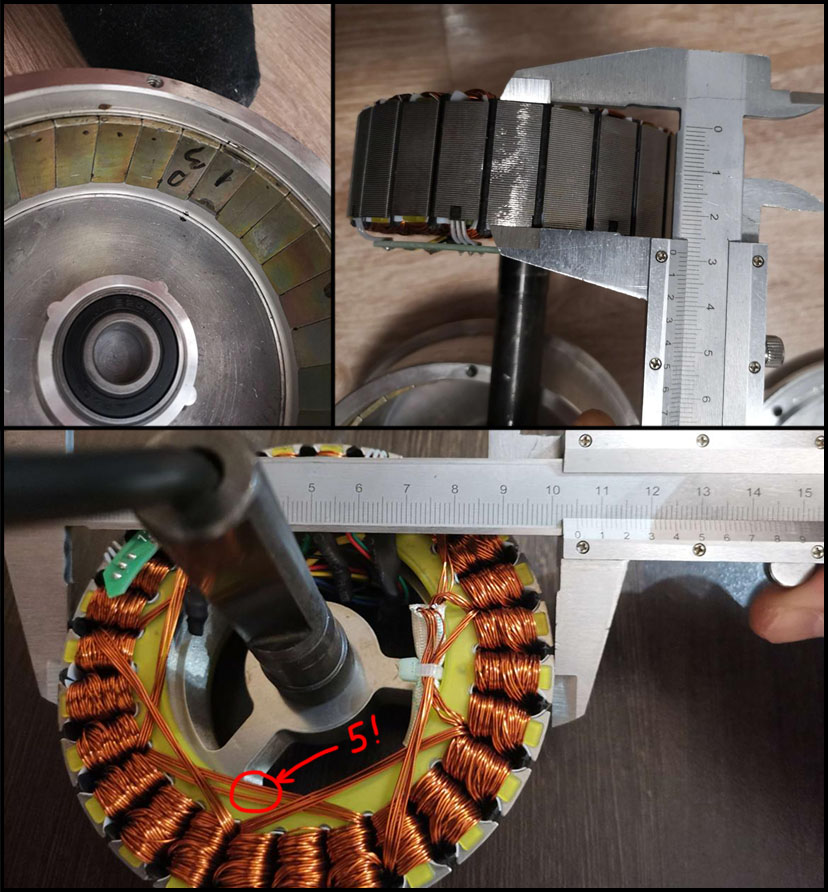
Less powerful items could have 25mm, 20mm or even 15mm stator width and less strands in winding wire.
It is important to understand, that any such motor will work, despite of internals. The main difference will be in peak motor torque (and so peak force that device can produce)
Real world torque results
As already multiple motors come through the project there is some statistics about torque of such motors.
All values there measured at 15A current!
| Stator width(mm) | Magnet length(mm) | Strands in wire | Torque(Nm) |
|---|---|---|---|
| 30 | 30 | 5 | 15.0 |
| 25 | 25 | 4 | 12.7 |
| 20 | 20 | 3 | 10.9 |
How to choose good one?
Unfortunately, there is no absolutely reliable way to determine the internal components of a motor without disassembling it. Motors with the same pattern on the front may have different internal structures, while motors with completely different external appearances could be similar inside.
The only approximate method to guess motor internals - is …. the motor weight! 
Because more powerful motors have more metal inside their weight should be higher Internals and power guess by weigh:
- 30mm magnets/stator - 2.9 kg
- 25mm magnets/stator - 2.6 kg
- 20mm magnets/stator - 2.3 kg